This study revaluated the 2007 Kerang railway level crossing accident using both a systems lens (AcciMap) and a cognitive schema methodology.
The Kerang accident occurred when a loaded semi-trailer truck struck a passenger train on a railway level crossing, killing 11 train passengers.
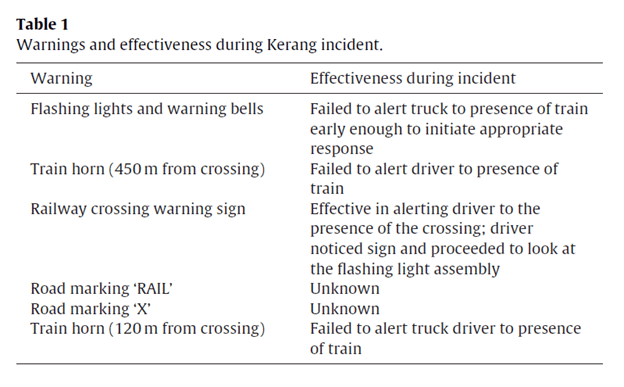
Several open questions remain, as like how different safety features succeeded or failed their goals:
Providing background it’s noted:
· Although this incident was formally investigated, they couldn’t explain why the driver proceeded through the crossing in the presence of a train due to the driver refusing to answer
· This study, therefore draws on the two methods to speculate why this could have been the case
· Previous research highlights various factors of driver non-compliance with rail level crossings (RLC); including failing to detect warnings, failing to comprehend their meaning or misjudging speed may account for half of RLC crashes in Australia
· High fatality rates of these interactions makes it difficult to ascertain the reasons why drivers fail to safely comply with RLC
· The authors give background on AcciMap and Rasmussen’s risk management framework – which I’ve mostly skipped since I think many are familiar with this
· They also discuss schema theory. Schema are mental templates of past experiences mapped with information in the world and resultingly produce behaviour. People possess these templates and are triggered by contextual conditions, direct perception and behaviour
· The schemas are unlikely to exist as separate templates, but rather an interconnecting set of structures that are triggered by circumstances and/or experiences
· Schemata are continually modified through interaction with the world
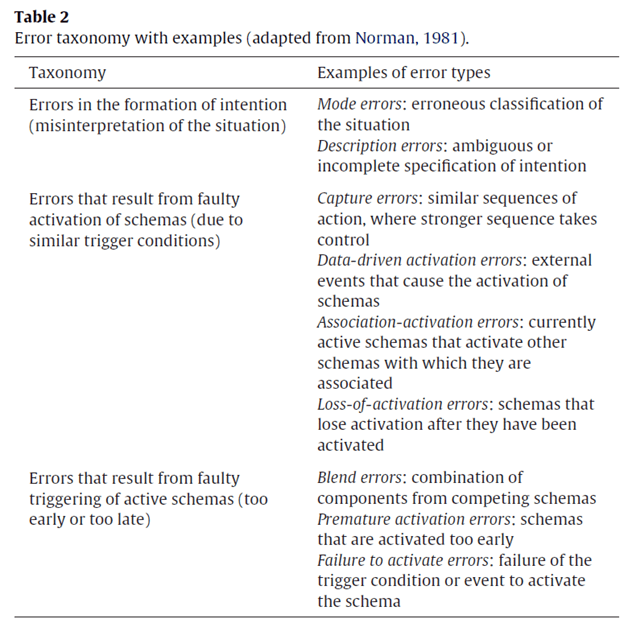
· Schema theory has provided mechanisms of human performance failure. This study drew on Norman’s 1981 taxonomy, shown below
· This includes failures in the formation of intention, faulty activation of schema, and failure to trigger appropriate schema
· They note “inappropriate formation of intention resulting from a failure to correctly classify the situation leads to mode errors (e.g. human attempts to interact with system believing it to be in a different mode) or description errors (e.g. in absence of all situational information human fails to fully specify acts required for intentions)” (p1283)
· Further, “Faulty or erroneous activation of schema due to similarities in trigger conditions leads to various errors, including capture errors, data-driven activation errors, loss of activation errors, forgetting an intention, and errors in task sequencing (e.g. misordering, skipping or repeating steps)” (p1283)
· And lastly, “failures in the triggering of schema (e.g. triggered at the wrong time or not triggered at all) also lead to various slips, including spoonerisms and blend errors” (p12983)
Norman’s taxonomy as used in this study for evaluating cognitive performance:
Results
Various factors could have contributed to the driver’s failure to notice activated RLC and the approach of the train.
These include:
Equipment and surroundings level
· The crossing had flashing lights and sign but no boom gates; they speculate that the presence of boom gates would have alerted the driver to the train earlier
· Weather conditions may also been factors. Although the main report states the weather was fine with good visibility, the sun was directly in front of the truck driver’s face throughout its approach to the crossing; a test run under similar weather conditions reported considerable sun glare from the road surface
· Trees in close proximity may have also obscured vision of the approaching train and the truck A-pillar provided temporary obscurement
· The first horn sounding from the train failed to alert the truck driver – perhaps not of sufficient intensity or a low expectation from the driver of an approaching train may have led “to the driver being biased against detecting this stimulus of train horns” (p1283)
· The speed limit of 100 km/h may also have been a factor
Physical processes and actor activities level
· A really important consideration is the driver’s experience of driving this route and of that crossing. He had driven this route approximately once a week for 7 years and had never encountered a train over that timeframe
Technical and operational management level
· Moreover on the day of the incident, a delay in departing meant that the driver encountered the train at that crossing, compared to every other time when he had not
· An inspection of the crossing by the infrastructure manager occurred in the past due to a series of near miss incidents and a letter from a train operator over concerns of user behaviour at the crossing
Local government and company level
· The haulage organisations seemingly lacked awareness of the issues of driver behaviour at crossings – also unaware of radio and newspaper pieces written about RLC safety
Regulatory bodies, state government and industry levels
· Various factors were listed here. One is the failure to upgrade the crossing to a fully active one with boom gates (although this particular crossing had been classed as a lower priority item)
· Since the incident, this crossing had been modified to include boom gates, LED lights, rumble strips, active advanced warning signs and reduction of speed
Government/Parliament policy and budgeting level
· Three factors were placed here. One was that the Australian standards were limited in that they didn’t consider RLC with a curved road on approach. Also a RLC risk assessment didn’t account for accident or near miss data for the crossing under assessment and is mostly weighted towards considering exposure data (such as volume of road and rail traffic passing through)
· Budget constraints limited the number of RLC that could be upgraded each year
The paper then discusses insights from the cognitive schema analysis. This section is far more speculative, of course.
They argue that Norman’s scheme-related failures “ostensibly play a role in rail level crossing non-compliance” (p1284).
When approaching an activated crossing with a train approaching, “activation of the wrong schema, caused by contextual conditions similar to those experienced at other inactive crossings (i.e. with no train approaching), could lead to diminished situation awareness, inadequate exploration of the environment, and delayed recognition of the crossing warnings” (p1284).
It’s suggested that the driver wasn’t aware of the train and the activated state of the RLC until it was too late to prevent the crash. Again, Norman’s taxonomy suggests that the activation of schema can be faulty if a schema is activated unintentionally, causing actions to intrude when not expected, or a schema may lose its activation before effectively directing behaviour.
They believe the evidence suggests that the truck driver’s performance was indicative of two schema errors.
One was faulty activation of schema error, which contributed to a Looked-But-Failed-To-See (LBFTS) error. LBFTS involve drivers failing to detect roadway entities despite looking at them.
They argue that faulty activation of schema error was the initiation of the inappropriate non-activated rail level crossing schema. In other words, the driver inadvertently activated the schema for crossing a RLC without a train present when he needed the schema for crossing a RLC with a train present (but had no specific template for at this particular crossing, having never encountered a train here over the 7 year period).
They state that “Once activated, the inappropriate schema was reinforced through environmental factors such as the trees which partially obscured the train. The LBFTS error, driven by the non-activated crossing schema, and potentially exacerbated by conditions such as sun glare, occurred as the driver scanned the crossing flashing light assembly, but failed to perceive the lights flashing” (p1285).
The incorrect schema, being for no-train situations, likely directed the driver’s perceptual activities and behaviours on approach to the crossing, thereby producing the LBFTS error activities (i.e. he didn’t expect to see a train, so ultimately didn’t see the signs of a train until it was too late).
They further argue that the faulty activation of schema error can “thus be classified as a data driven activation error”, meaning that external events, like familiarity with the roadway, triggered the inappropriate schema.
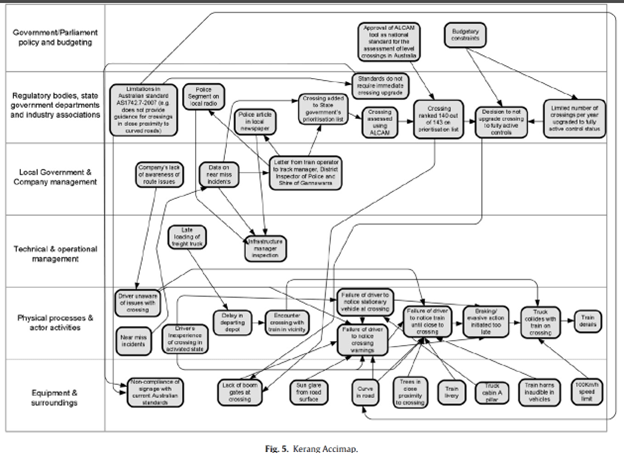
In conclusion, the authors argue that a systems description of the event revealed factors across the entire rail system, from direct technical factors like active controls, to state level budgetary constraints, to local factors like the environment and driver expectations, assumptions and behaviour.
That is, factors across the whole sociotechnical domain “conspired to place the truck and train at the crossing together at the same time … and which facilitated the truck drivers failure to see and perceive the flashing warning lights and the approaching train” (p1286).
Not surprisingly, it’s concluded that taking an integrated systems approach, that also directly evaluates the individual’s cognition and schemata, provides useful insights on the interactions of performance.
Quoting the paper, “A shift away from individual blame and culpability to a learning culture for system improvement is needed. This can only occur when the complexities of human behaviour and the impact of the system on behaviour is understood within the road and rail industries, government, the legal system and society at large” (p1286).
For those interested, the AcciMap is below:
Authors: Salmon, P. M., Read, G. J., Stanton, N. A., & Lenné, M. G. (2013). Accident Analysis & Prevention, 50, 1278-1288.
Study link: https://doi.org/10.1016/j.aap.2012.09.029
Link to the LinkedIn article: https://www.linkedin.com/pulse/crash-kerang-investigating-systemic-psychological-rail-ben-hutchinson
